RÉPUBLIQUE ALGÉRIENNE DÉMOCRATIQUE ET POPULAIRE
Université des Sciences et de la Technologie Houari Boumediene
Institut de Génie Mécanique
1999/2000
Spécialité : Productique
THEME :
LA LOGIQUE FLOUE
Présenté et étudié par :
Melle Faiza BOURAHLA
SOMMAIRE
Objectif du travail
1 – INTRODUCTION
1.1 – Généralités
1.2 – Domaine d’application de la logique floue
2 - PRINCIPE FONDAMENTAL DE LA LOGIQUE FLOUE
3 – BASES GENERALES DE LA LOGIQUE FLOUE
3.1 – Variables linguistiques
3.2 – Définition des variables linguistiques
3.3 – Déductions floues (inférences)
3.3.1 – Inférence avec une seule règle
3.3.2 – Inférence avec plusieurs règles
3.4 – Les opérateurs
4 – REGLEGE ET COMMANDE PAR LOGIQUE FLOUE
4.1 – Réglage conventionnel
4.1.1 – Réglage avec régulateur standard
4.1.2 – Structure d’un réglage avec régulateur standard
4.1.3 – Réglage avec régulateur par contre réaction d’état
4.1.4 – Structure d’un réglage avec régulateur par contre réaction d’état
4.2 – Réglage par logique floue
4.2.1 – Procédé lors de la conception d’un réglage par logique floue
4.2.2 – Structure de réglage par logique floue
4.2.2.1 – Configuration interne d’un régulateur par logique floue
5 – PROPRIETES DES REGLAGES CONVENTIONNELS ET REGLAGES PAR LIGNE DE FLOUE
6 – AVANTAGES ET DESAVANTAGES DU REGGLAGE PAR LOGIQUE FLOUE
7 – COMMANDE FLOUE – Exemple d’application
Objectif du travail
La logique floue (Fuzzy logic) est de grande actualité. Le but visé dans cette étude est de présenter d’un part le principe de cette nouvelle méthode de réglage et établir d’autre part une comparaison entre les méthode conventionnelle et cette dernière, ceci pour mieux éclaircir les différences, de familiariser avec la nouvelle méthode puis connaître ces avantages dans le réglage automatique.
1 – INTRODUCTION
1.1 - Généralités :
La Fuzzy logic ou la logique floue est une nouvelle méthode de traitement pour les problèmes de réglage et de prise de décision établit en 1965 par le professeur LOTFI A ZADEH.
Initialement, cette théorie était appliquée dans des domaines non techniques tel que le commerce, lajurisprudence ou la médecine dans le but de compléter les systèmes experts qui fonctionnaient à l'aide d'ordinateur manipulant des variables exactes (1 et 0).
Les premières applications au niveau de réglage n'ont apparu qu'en 1975.
1.2 - Domaine d'application de la logique floue :
La logique floue est de grande actualité. Il y a surtout des réalisations dans le domaine du réglage et de la commande de processus industriels liés à l'énergie, les transports, la transformation de matière … On peut mentionner quelques applications :
2 - PRINCIPE FONDAMENTAL DE LA LOGIQUE FLOUE
Pour bien mettre en évidence le principe fondamental de la logique floue, on présente un simple exemple : Comment classer des personnes en trois ensembles : "Jeunes", "entre 2 âges" et "âgé".
figure 1.1 : Classification selon la logique classique
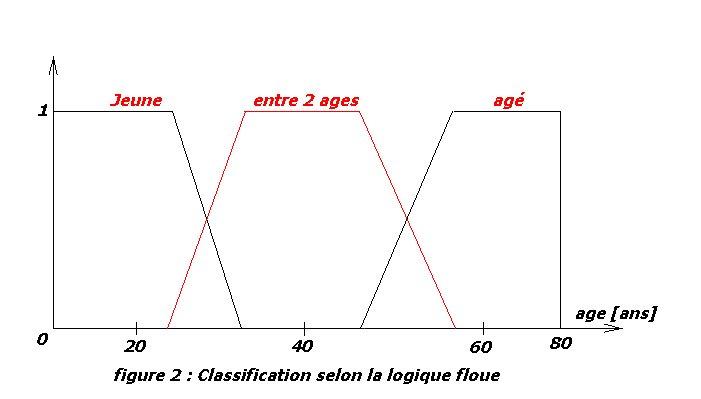
figure 1.2 : Classification selon la logique floue
Selon ces deux figures, la classification des personnes en trois ensembles est bien clair mais très différentes, en effet :
Selon la logique classique (logique de boole), toutes personnes âgées de moins de 30 ans sont considérées comme "jeune" et celles âgées de 50 ans appartiennent l'ensemble âgé or, en vérité le passage du jeune au vieux ce fait progressivement et individuellement ce qui nous amène à dire qu'une telle classification n'est pas logique.
Cependant, la logique floue, dont les variables peuvent prendre n'importe qu'elle valeur. On parlera de fonction d'appartenance m , permet de tenir compte du fait qu'une personne de 25 ans est considéré comme jeune avec un certain pourcentage (m =0,75%), et comme étant entre les 2 âges avec un autre % (m =0,25%).
3 - BASES GENERALES DE LA LOGIQUE FLOUE
Les éléments de base de la logique floue sont :
On donnera un petit aperçu sur chaque élément sans détailler.
3.1 - Variables linguistiques :
Pour déduire une certaine situation, un phénomène ou un procédé, on utilise souvent des expressions floues comme : quelque - souvent - beaucoup - grand - chaud - lent …
Ces expressions permettent les valeurs des variables linguistiques.
3.2 - Définition des variables linguistiques :
En vue d'un traitement mathématique des variables linguistiques dans le bure de traiter des déductions floues, une définition des variables linguistiques s'impose, et ce dans ce contexte qu'on attribue à chaque valeur de variable des fonctions d'appartenance m , dont la valeur varie entre 0 et 1 en tenant compte de la classification en un certain nombre d'ensembles floues. Ceci étant bien présenté à la figure 1.2.
3.3 - Déduction floues :
Les valeurs des variables linguistiques sont liées entre elles par des règles afin de tirer des conclusions. On parle alors de déduction floue ou inférence.
On distingue deux types genre de règles d'inférence :
3.3.1 - Influence avec une seule règle :
Ce cas se présente lorsqu'il faut comparer plusieurs concurrents (objets ou personnes) dans une certaine situation et en choisir l'optimum.
3.3.2 - Influence plusieurs règles :
Ce cas se présente lorsqu'une ou plusieurs variables nécessitent une prise de décision différente suivant les valeurs qu'atteignent ces variables.
3.4 - Les opérateurs :
On dit dans la section précédente que les variables linguistiques sont liées entre elles au niveau des inférences, et ceci est fait par les opérateurs qui sont "ET", "OU" et "NON".
4 - REGLAGE ET COMMANDE PAR LA LOGIQUE FLOUE
4.1 - Réglages conventionnels :
Un réglage conventionnel est réalisé soit par des régulateurs standard, soit par des régulateurs d'état. De plus en plus, ces régulateurs sont réalisés digitalement à l'aide de microprocesseurs.
Dans cette section on présentera un résumé des deux méthodes puis on les comparera avec le réglage par logique floue.
4.1.1 - Réglages avec régulateur standard (réglage classique)
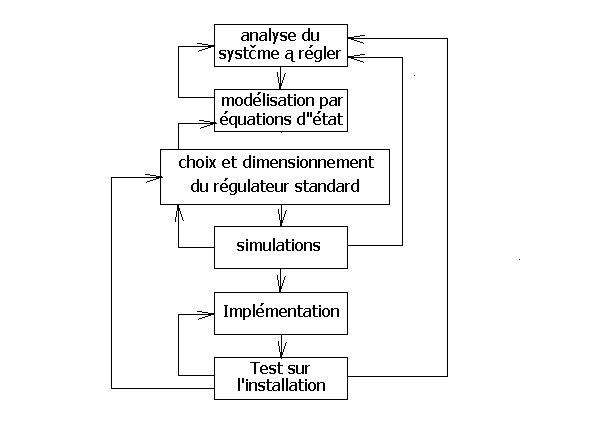
figure 4.1 - Procédé lors de la conception d'un réglage avec régulateurs standard
Les étapes principales à suivre lors de la conception d'un réglage avec régulateurs standard sont présentés dans la figure 4.1. La première étape consiste en une analyse approfondie du système à régler, suivie de la modélisation par fonction de transfert. Souvent, ces deux premières étapes sont très délicates et nécessitent beaucoup de temps. Parfois, il est même impossible de déterminer un modèle convenable. Le système à régler est en général décrit par des constantes de temps, parfois par une pulsation propre et un coefficient d'amortissement. On procède alors au choix et au dimensionnement du régulateur standard. Il est judicieux d'effectuer une simulation, soit numérique soit en temps réel afin de vérifier le comportement dynamique du réglage, surtout en ce qui concerne l'influence de limitations et de corrections. Enfin, on passe à l'implantation du régulateur et aux tests sur l'installation. Il est souvent nécessaire de retourner une étape précédente pour améliorer les résultats obtenus.
4.1.2 - Structure d'un réglage avec régulateur standard
figure 4.2 - Structure d'un réglage avec régulateurs standard
La figure 4.2 montre la structure d'un réglage avec régulateur standard appelé aussi réglage classique. Sur ce système, à régler S interviens d'une part la grandeur de commande u et d'autre part la grandeur de perturbation v. A la sortie apparaît la grandeur à régler y. La grandeur de commande u est fournis par l'organe de commande OCM, commandé par le signal de commande ucm. Celui-ci provient du régulateur standard RS.
4.1.3 - Réglage avec régulateur par contre réaction d'état
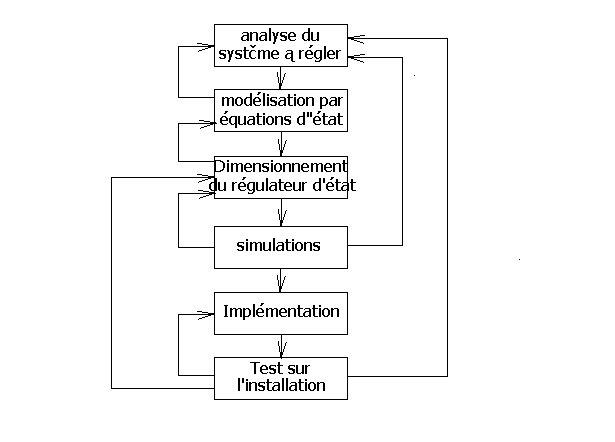
figure 4.3 - Procédé lors de la conception d'un réglage avec régulateurs par contre réaction d'état
La figure 4.3 représente les étapes principales à suivre lors de la conception d'un réglage avec régulateurs par contre réaction d'état. sont présentés dans la figure 4.1.
Dans ce cas aussi, il faut faire une analyse approfondie du système à régler. La modélisation fait appel a des équations d'état. Ces deux étapes doivent être exécutées de manière soigneuse et nécessitent souvent un travail considérable. Suit l'étape de dimensionnement du régulateur d'état par imposition des pôles. Il est presque indispensable d'effectuer une simulation. En effet, le degré de liberté lors du dimensionnement (choix des pôles) est très large et une vérification du choix s'impose. Les dernières étapes sont l'implémentation et le test sur l'installation.
Dans ce cas aussi, il est souvent nécessaire de retourner à une étape précédente.
4.1.4 - Structure d'un réglage avec régulateur par contre réaction d'état
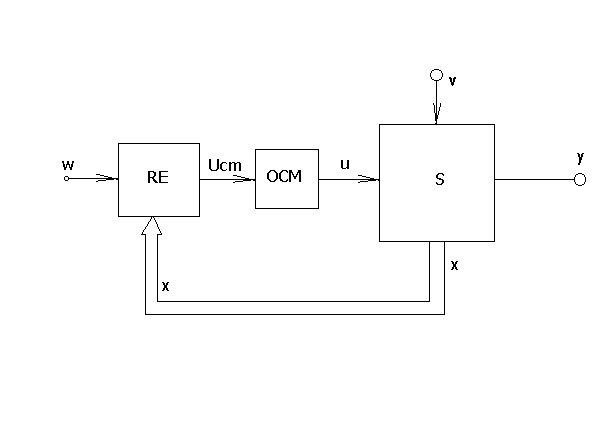
Voir figure 4.4 - Structure d'un réglage avec régulateurs par contre réaction d'état
La structure d'un réglage avec contre réaction d'état est représenté à la figure 4.4. On parle aussi de réglage moderne. On reconnaît le système de réglage S et l'organe de commande OCM. Le signal de commande ucm est fournis par le régulateur d'état RE. Sur celui-ci interviennent la grandeur de consigne w et les grandeurs d'état, réunis dans le vecteur xs, les grandeurs d'état doivent être mesurables ou observables.
4.2 - Réglages par logique floue :
Cette section est caractérisée à la présentation de la structure d'un réglage par logique floue et met en évidence les différences par rapport au réglage conventionnels, soit au niveau de la structure, soit au niveau du procédé lors de la conception de base.
4.2.1 - Procédé lors de la conception d'un réglage par logique floue
Le procédé à suivre lors de la conception d'un réglage par la logique floue est assez différent de celui d'un réglage conventionnel. La figure 4.5 en montre les étapes principales.
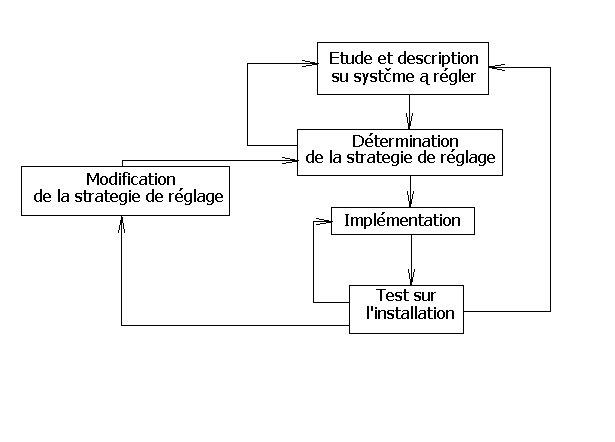
Figure 4.5 - Procédé lors de la conception d'un réglage de la logique floue
D'abord, il faut étudier le système à régler et en faire une description adéquate. Il ne s'agit pas d'une analyse proprement dite afin d'établir un modèle mathématique. On doit plutôt explorer le comportement du système à régler vis-à-vis de variation de la grandeur de commande et déterminer des grandeurs mesurables caractéristiques du comportement dynamique. La description peut faire appel aux variables linguistiques, et être accompagnée d'une définition par fonctions d'appartenance. Si le système à régler déjà existant, cette étude peut se faire par des mesures sur l'installation elle-même. Dans le cas contraire, il faut adapter des expériences obtenues avec des installations similaires.
On passe alors à la détermination de la stratégie de réglage qui comprends la fuzzification, les inférences et les infuuzzifications. Après l'implémentation, le plus souvent sur PC ou microprocesseur par logiciel ou par matériel à l'aide de processeur dédicacés (ce sont des processeurs spécifiques a la logique floue). On fait des tests sur l'installation il est en général indispensable de modifier la stratégie de réglage interactivement en plusieurs passages, afin de trouver un comportement convenable. Cette modification est mise en évidence par la figure 4.5 puisqu'il s'agit d'une étape importante dans la conception d'un réglage par logique floue.
A noter que dans le cas du réglage par logique floue il est n'est pas nécessaire d'établir un modèle. Si, pour un certain système à régler, il existe tout de même un modèle mathématique convenable on peut l'utiliser pour tester et modifier la stratégie de réglage à l'aide d'une simulation numérique. Cela facilite la mise en service sur l'installation réelle.
4.2.2 - Structure de réglage par logique floue
La figure 4.6 présente la structure lors d'un réglage par logique floue.
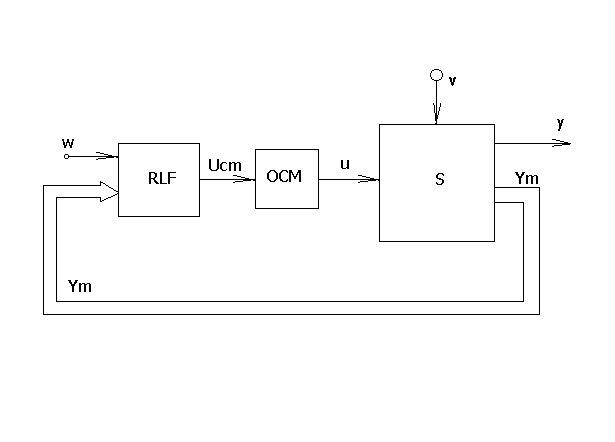
Figure 4.6 - Structure d'un réglage lors d'un réglage par logique floue
Dans ce cas aussi, il y a le système à régler S et l'organe de commande OCM. Le régulateur par logique floue RLF fournit le signal de commande Ucm. Il reçoit à son entrée la grandeur de consigne w et une ou plusieurs grandeurs mesurées, réunis dans le vecteur Ym. Ce dernier contient en général la grandeur à régler y et, le cas échéant, d'autres grandeurs mesurées qui sont déterminantes pour y saisir l'évolution dynamique du système à régler.
On constate une certaine affinité avec le ré le réglage par contre réaction d'état. En général, le nombre de grandeurs réunies dans le vecteur yM et inférieur au nombre des grandeurs d'état.
4.2.2.1 - Configuration interne d'un régulateur par logique floue
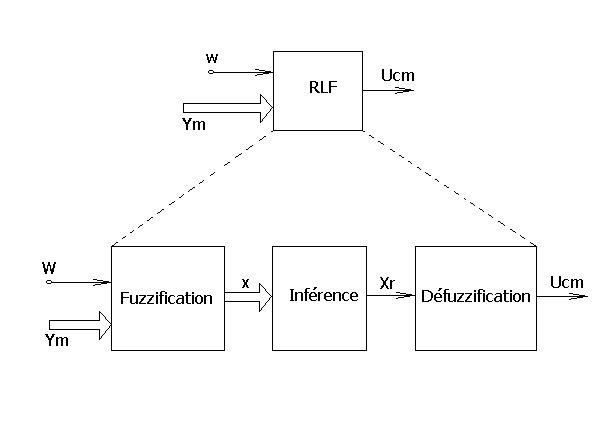
figure 4.7 - Configuration interne d'un régulateur par logique floue
OK
5 – PROPRIETES DES REGLAGES CONVENTIONNELS ET REGLAGES PAR LIGNE DE FLOUE
Les propriétés essentielles d'un réglage avec régulateurs standard sont les suivants :
Comme propriétés essentielles d'un réglage avec régulateur par contre réaction d'état, on peut mentionner:
Les propriétés essentielles d'un réglage par logique floue peuvent être résumés de la manière suivante:
6 – AVANTAGES ET DESAVANTAGES DU REGLAGE PAR LOGIQUE FLOUE
LES AVANTAGES ET LES DESAVANTAGES DU REGLAGE PAR LOGIQUE DE FLOUE
Evidemment, le réglage par la logique floue réunit un certain nombre d'avantages et de désavantages. Les avantages essentiels sont :
Par contre, les désavantages sont :